


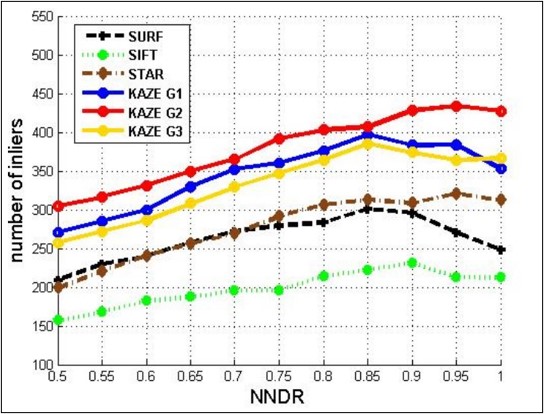
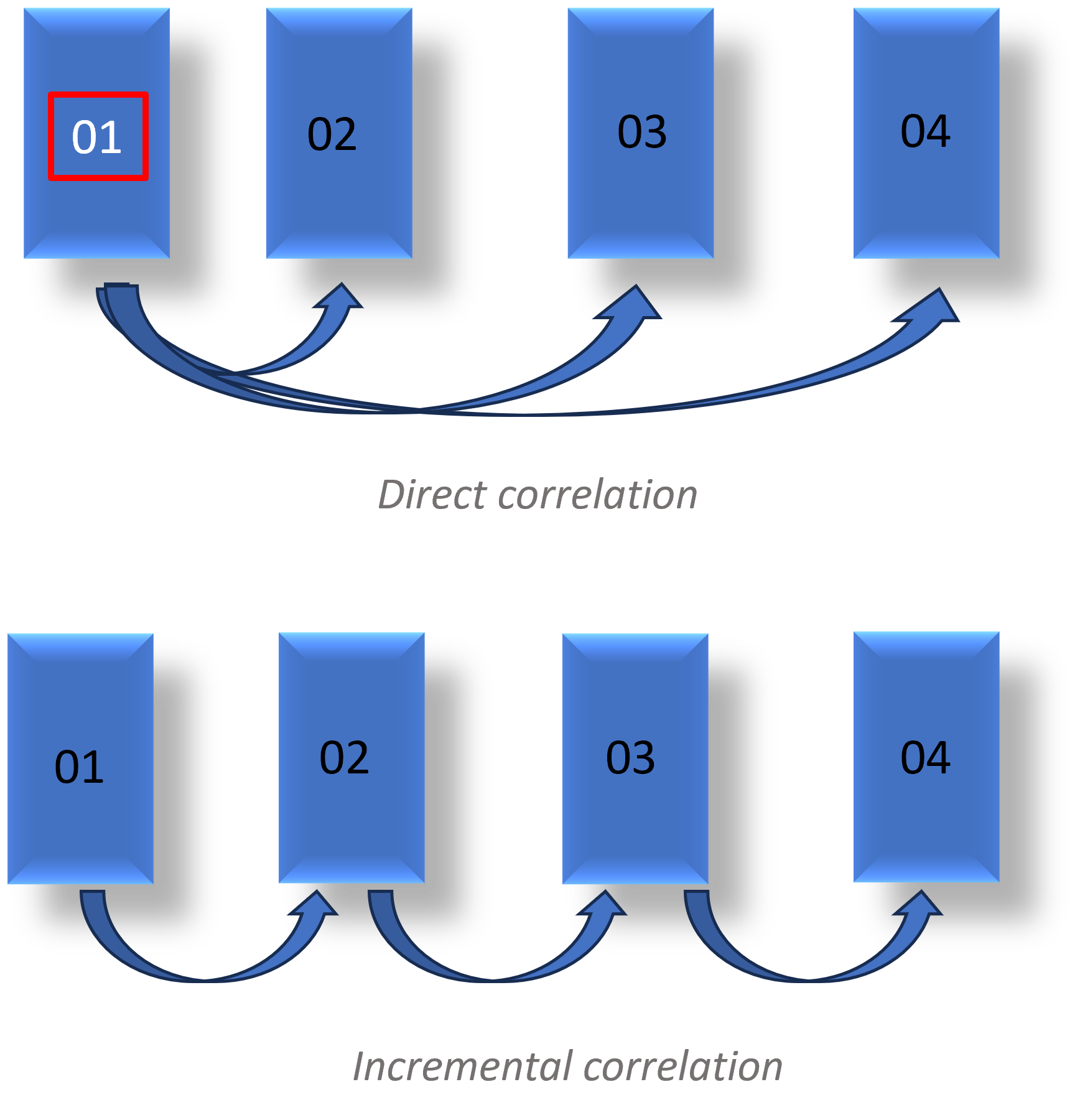
Comparison between the performance of different feature detection functions
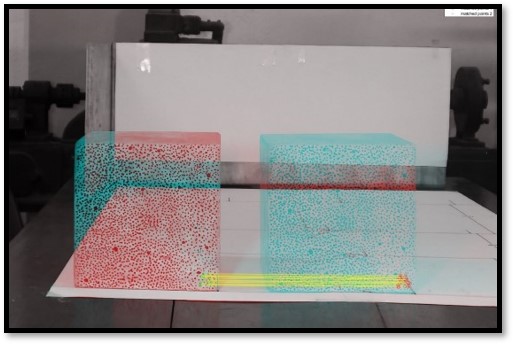
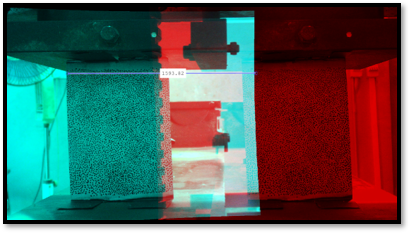
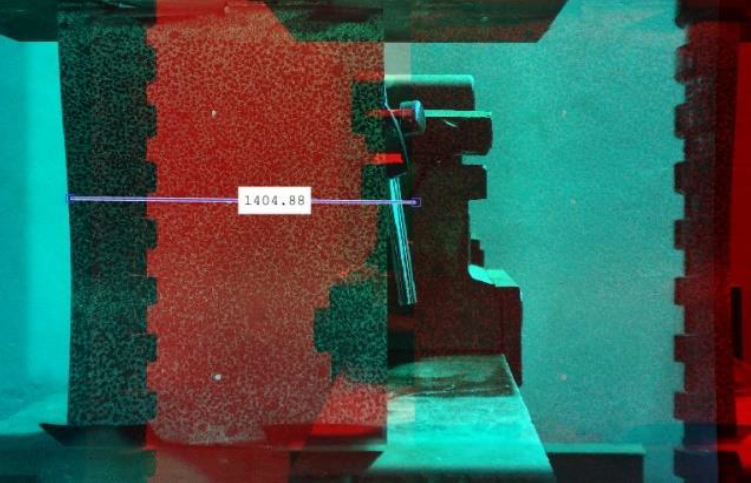
Feature matching between the deformed image and the reference image
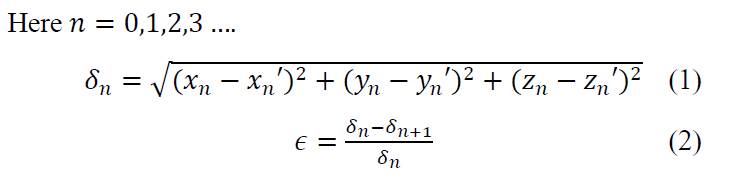
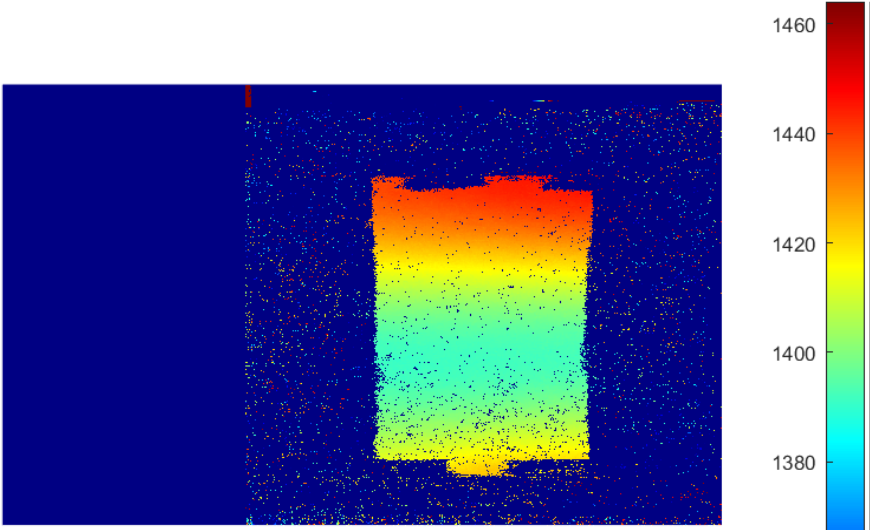
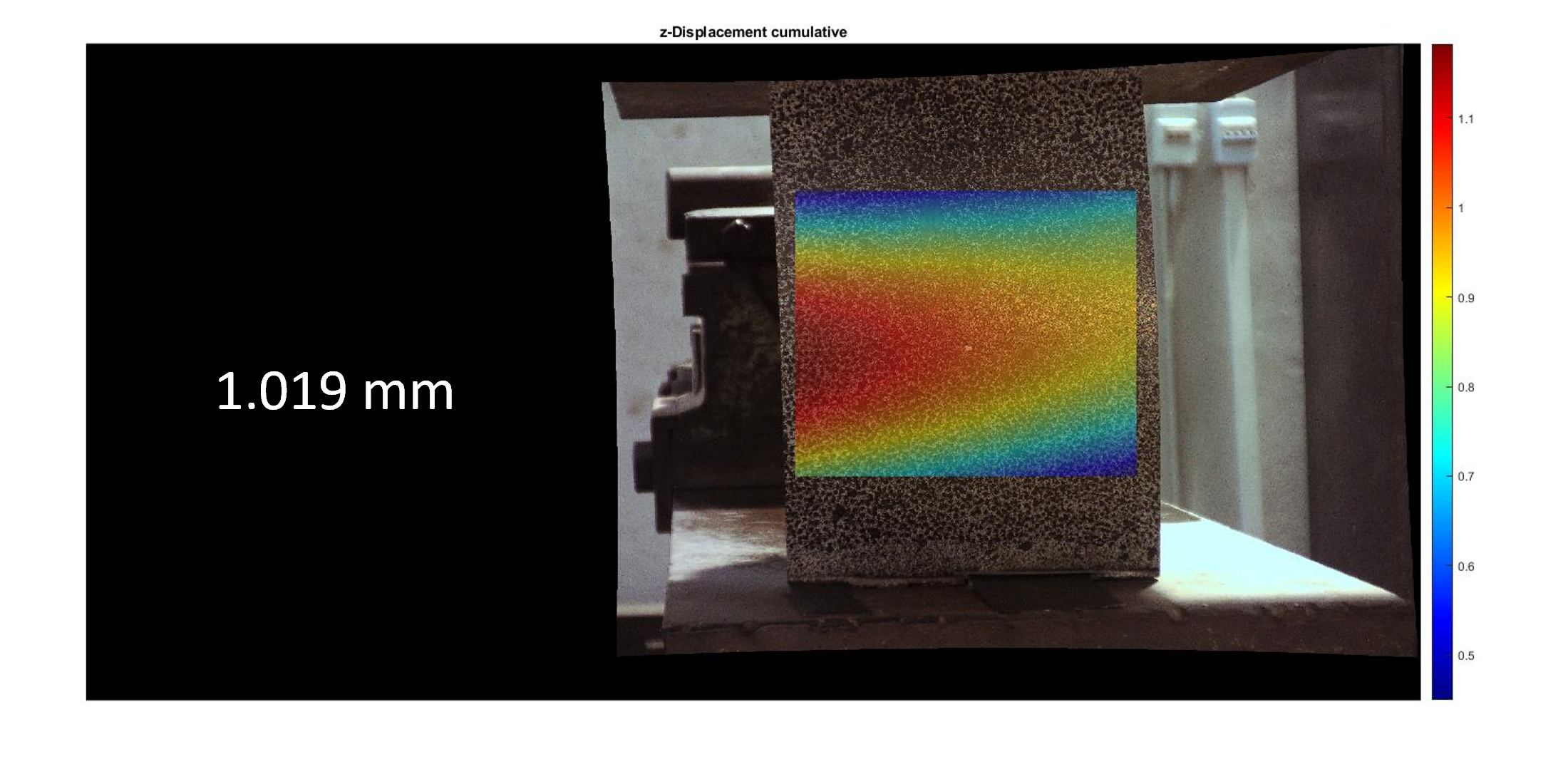
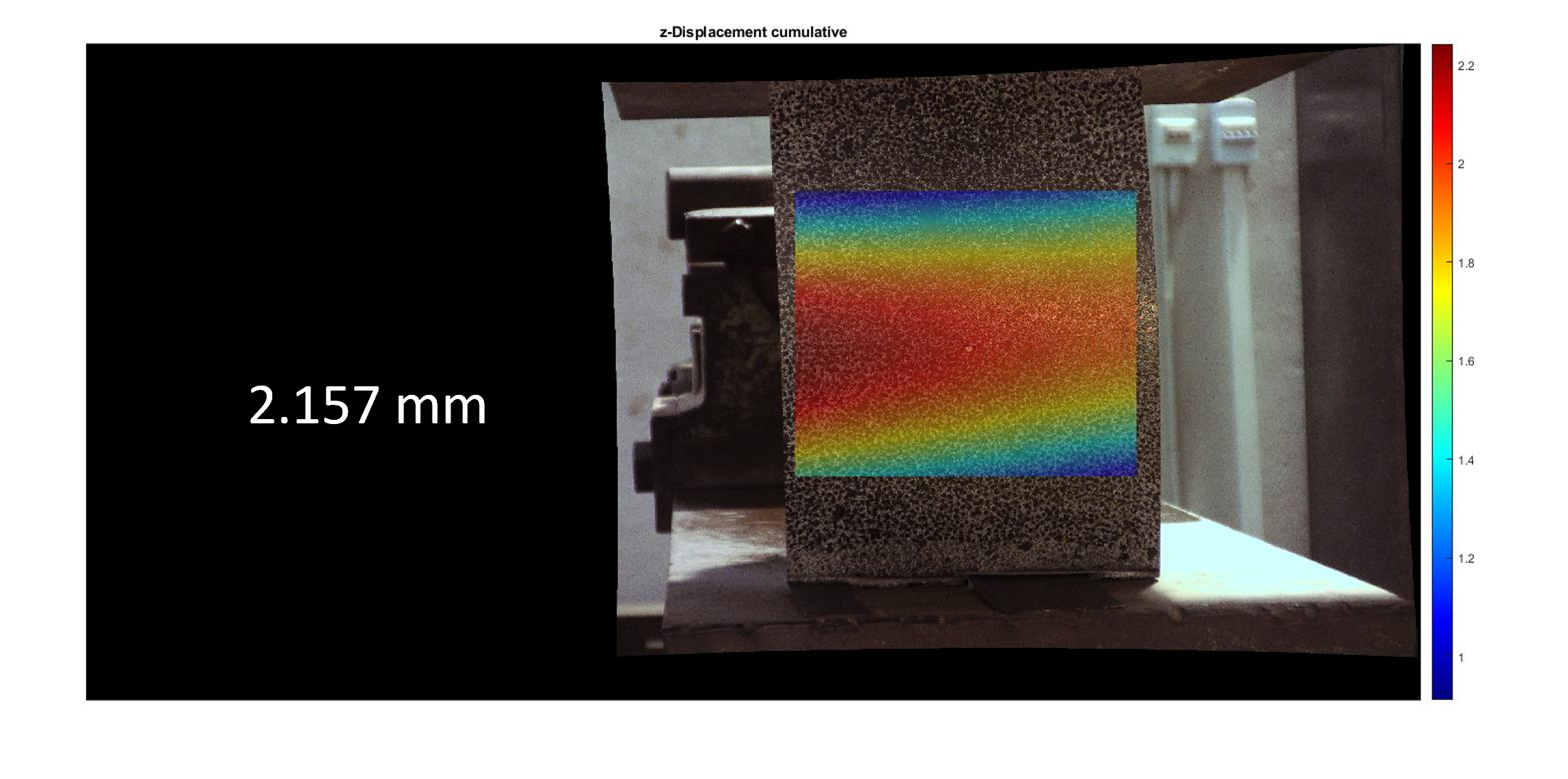
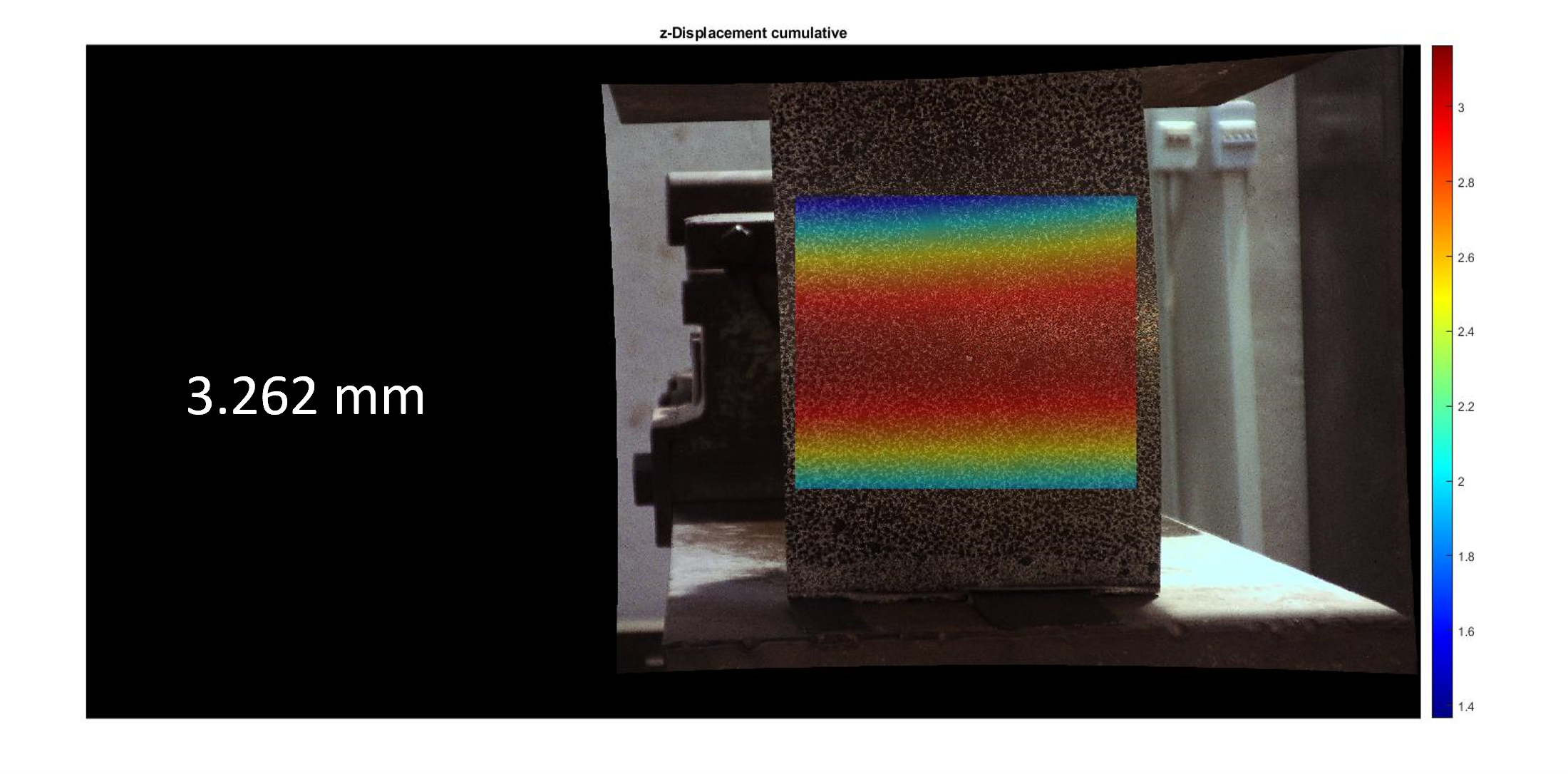
Calculation of displacement
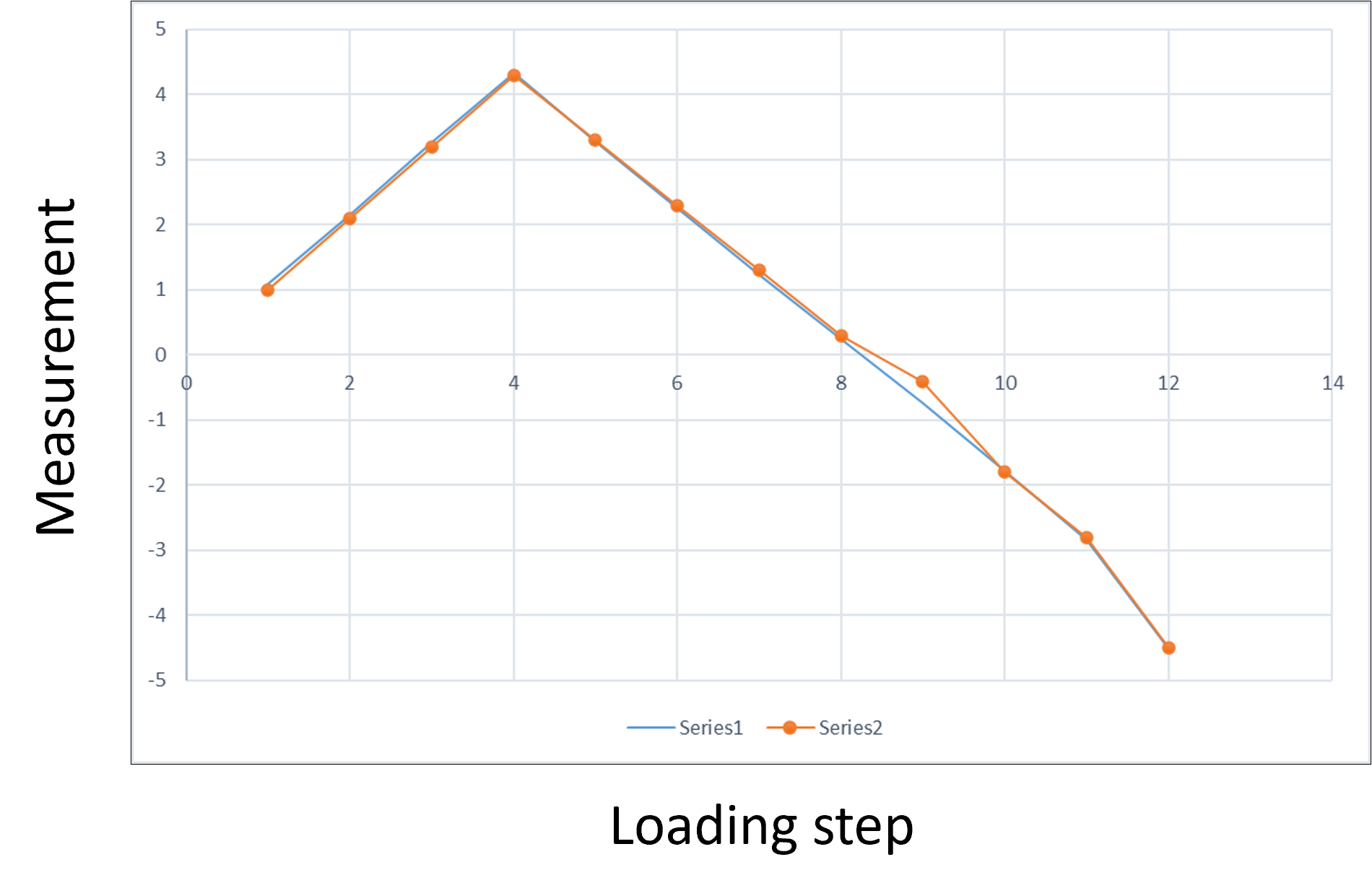
Results from DIC compared with dial-guage readings


Comparison between the performance of different feature detection functions
Feature matching between the deformed image and the reference image
Calculation of displacement
Results from DIC compared with dial-guage readings